

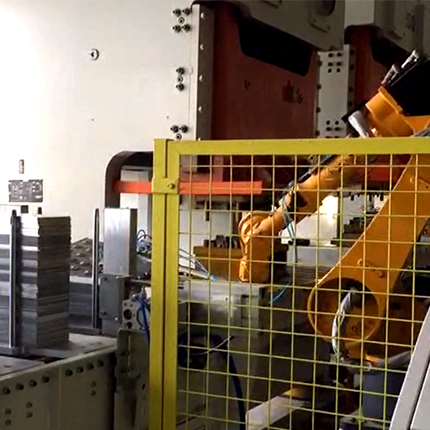



上下料搬運機器人是一種集機械、電子、控制、計算機、傳感器、人工智能等多學科先進技術于一體的現代制造裝備。它主要由執行機構、驅動裝置、檢測裝置和控制系統等部分組成。通過編程和示教,機器人能夠模擬人的手臂和手腕動作,實現工件的抓取、搬運、放置等任務。下面對上下料搬運機器人的工作原理和功能展開介紹。
一、上下料搬運機器人的工作原理
在執行任務時,上下料搬運機器人首先通過傳感器感知周圍環境,確定工件的位置和姿態。然后,控制系統根據預設的程序和實時感知的信息,計算出機器人各關節的運動軌跡和速度。驅動裝置驅動機器人各關節按照計算出的軌跡和速度進行運動,使機器人末端執行器(如夾爪、吸盤等)到達確定位置,完成工件的抓取。接著,機器人將工件搬運到確定位置,通過末端執行器釋放工件,完成整個搬運過程。
二、上下料搬運機器人的功能
1. 有效性
上下料搬運機器人可以連續24小時不間斷地工作,大大提高了生產效率。同時,機器人具有較快的運動速度和較高的定位精度,可以在短時間內完成大量搬運任務。

2. 準確性
機器人通過高精度傳感器和控制系統實現準確定位和抓取,保證了搬運過程中的穩定性和準確性。
3. 可靠性
上下料搬運機器人采用高品質的材料和先進的制造工藝,具有較高的耐用性和可靠性。同時,機器人具備故障自診斷和報警功能,可以及時發現并解決問題。
4. 靈活性
機器人可以根據不同的任務需求進行編程和示教,適應不同的工作環境和工件形狀。同時,機器人具備擴展和升級的能力,可以根據企業的發展需要進行技術更新和升級。
5. 安全性
上下料搬運機器人可以在一定程度上替代人工進行危險作業,降低工人的勞動強度和風險。同時,機器人具備安全防護裝置和緊急停止功能,確保在發生意外情況時能夠迅速停機并保護人員安全。
以上就是對上下料搬運機器人工作原理和功能的介紹,上下料搬運機器人采用模塊化設計思想,將各個功能模塊進行標準化和系列化設計。這樣可以降低制造成本和維護成本,提高機器人的可靠性和可維護性。


